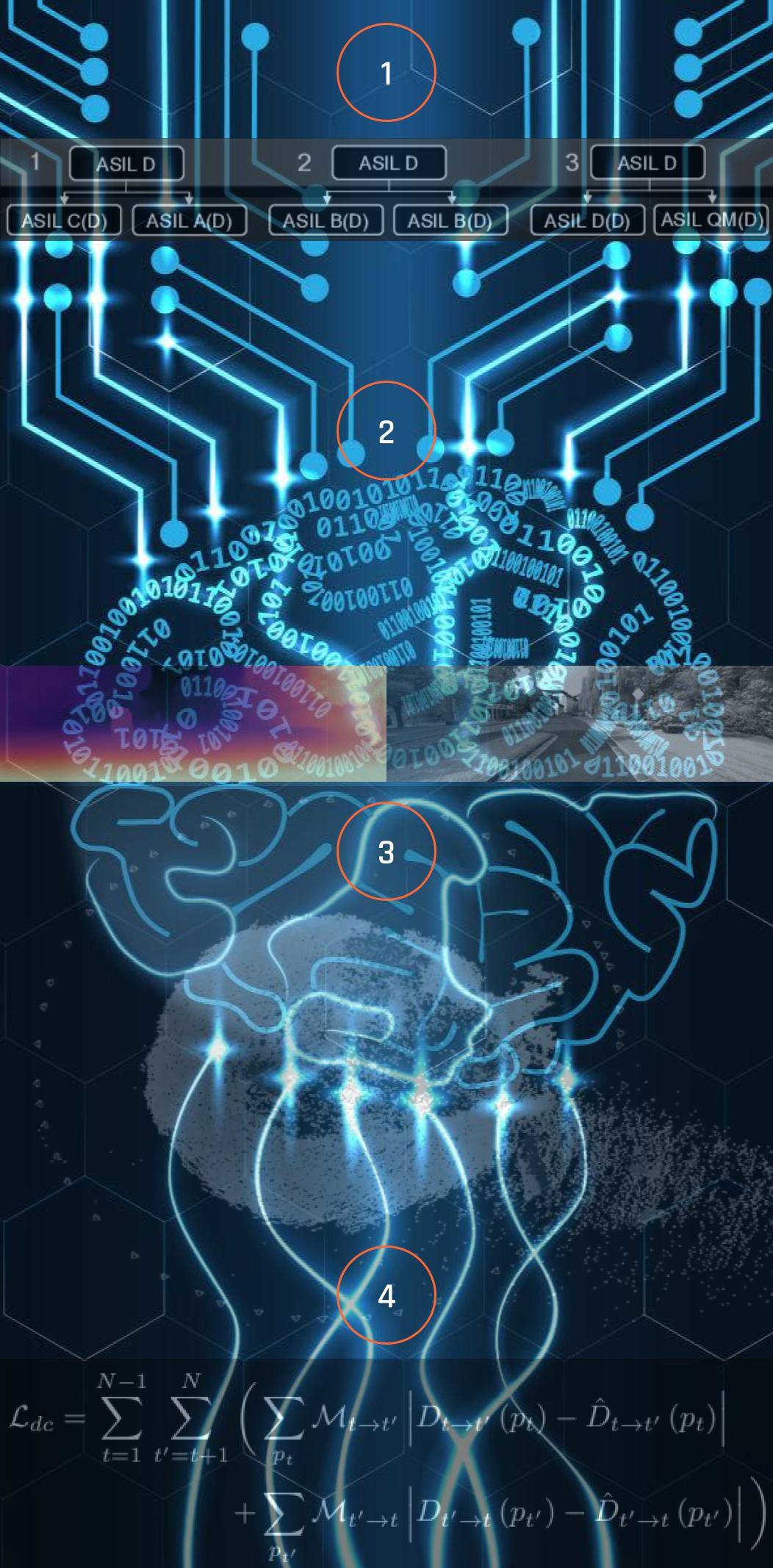
AI Safety Design: Towards Euro NCAP, ISO 26262, ISO/PAS 21448 (SOTIF), Formal Verification
Self-Supervised Training at Large Scale and therefore designed for Domain Adaptation
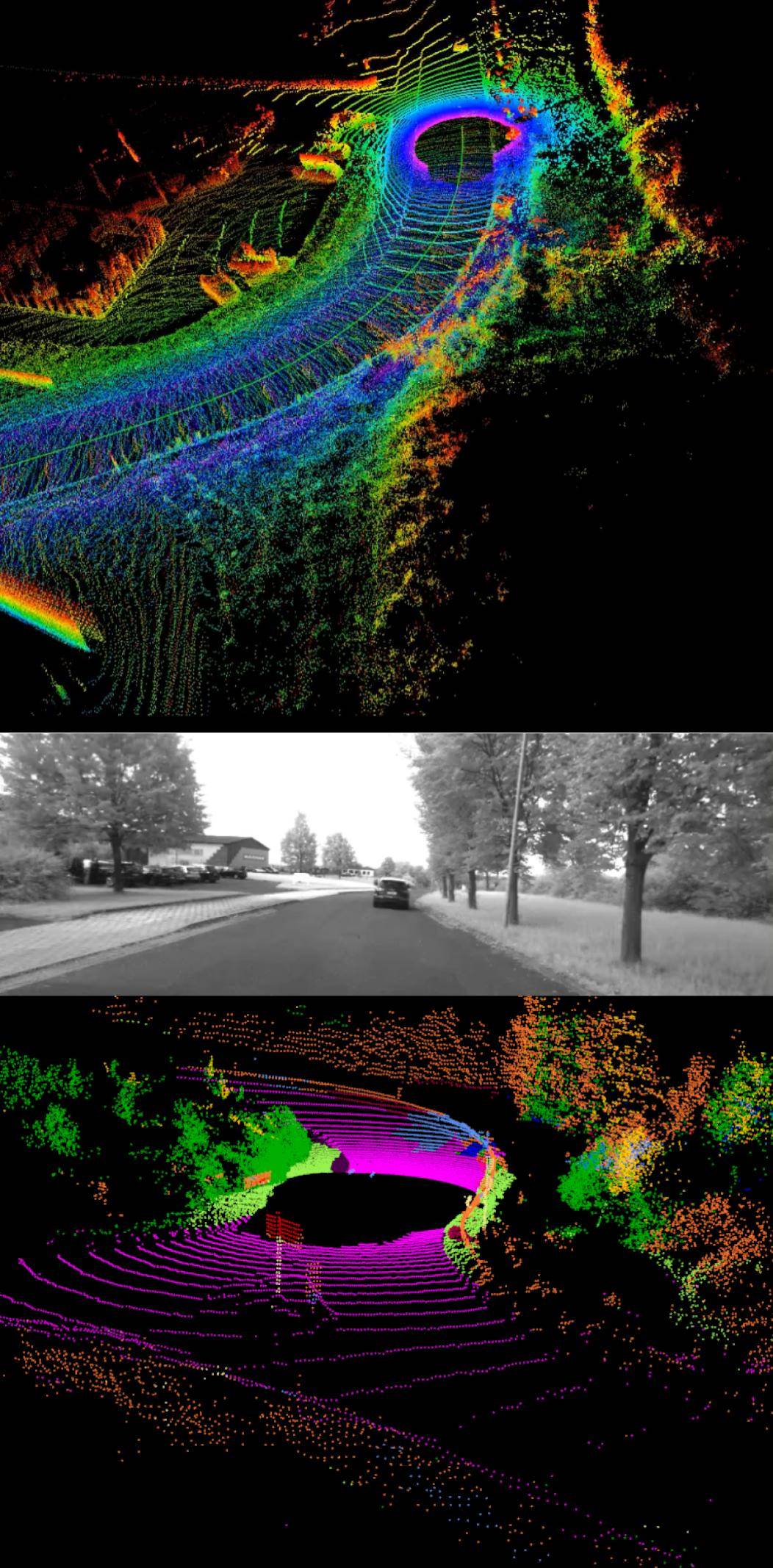
LIDAR based SLAM (Top) & Semantic Scene Parsing on Point Clouds (Down)
VISIONAIRY® Safe AI How It Works
Modern AI technologies, e.g. neural networks, are very powerful due to their fundamental approach of processing massive data in parallel. This statistical property has led to the fact that no AI approach has yet been approved for highly safety-critical systems such as: A – BVLOS Drones, B – Automated Road Vehicles and C – Automated Manned Aircrafts. Since their regulatory requirements like A – SORA, B – ISO26262 / SOTIF or C – DO178 demand high determinism within the process regulation.
At Spleenlab, we have developed a new approach that for the first time allows perceptual AI to be approved in such fields. Our unique technology is based on four key concepts that are incorporated in the development of all our products:







")